3D capture & modeling
The camera captures once and reconstructs the part's 3D point cloud and pose — no templates, no hand-drawn feature points.
Products · Robot Vision · ROBOTIC INTELLIGENCE
DaoAI Robot Vision — 3D vision guidancepicking, machine tending, assembly and random bin picking. One world-model foundation lets robots understand space, plan their own paths, with sub-millimetre hand-eye coordination.
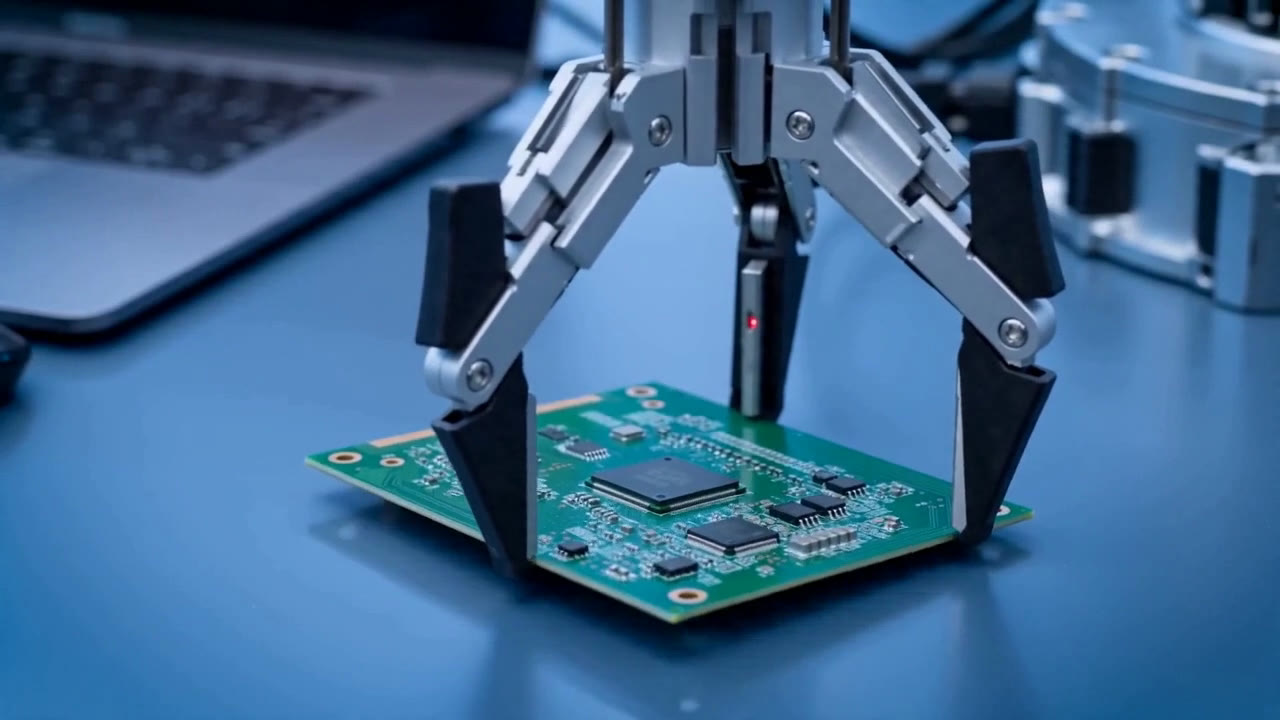
The camera captures once and reconstructs the part's 3D point cloud and pose — no templates, no hand-drawn feature points.
The world model understands spatial, stacking and occlusion relationships, outputting a graspable pose and priority for every part.
It automatically plans a collision-free path and maps the grasp pose into the arm's coordinate frame — a perceive-reason-act loop.
Even when parts are randomly piled and occluding each other, it recognizes and plans the pick one by one.
Precise alignment even when incoming parts aren't fixed in place — no need for precision fixtures.
No CAD templates; just as stable on reflective, dark and irregular parts.
±0.05mm calibration accuracy — picks precisely, places reliably.
One vision system does both inspection and robot navigation, reusing the same foundation.
Connects to ABB / KUKA / FANUC / domestic robots via SDK / API.
Why we're different · WHY DAOAI
Peers do either vision only or arm integration only. We build from sensor and 3D imaging to world model — Full-stack in-house — inspection and guidance share one foundation, getting smarter the more it's used.
100M+ real industrial data points continuously refine one spatial-understanding model.
Eight years on the factory floor, with deployment engineering experience accumulated line by line.
Typical applications · APPLICATIONS
Pick bolts, fasteners, castings and other loosely-piled parts straight onto the line.
Automatic clamping and transfer of blanks / finished parts, replacing manual handling.
Vision-aligned guidance for assembly, screwdriving, connector insertion and dispensing.
Recognition and de-palletizing of mixed cartons and mixed-stacked pallets.
High-precision picking of small, reflective and irregular parts.
Adaptively plans the machining path along the part's actual contour.
| Criteria | Traditional 2D vision | Generic 3D solution | DaoAI Robot Vision |
|---|---|---|---|
| Incoming-part requirements | Needs fixed position / fixtures | Limited stacking | Picks straight from random piles |
| Modeling | Hand-drawn ROI / templates | Relies on CAD templates | Point cloud + world model, no templates |
| Reflective / dark parts | Prone to failure | Limited adaptability | Multimodal imaging, stable |
| Data security | — | Often needs the cloud | 100% on-prem, data never leaves |
| Optimization | Fixed algorithm | Needs vendor involvement | Learns continuously from line feedback |